Claude Code 完整安装与使用教程 重要前置说明 身份澄清:Claude Code 是 Anthropic 官方推出的 Agentic 编程工具,分为两条独立产品线: VS Code 官方扩展
阅读更多...
AI Agent 架构(通俗 + 技术双版,附分层、流程、组件、主流框架) AI Agent 即智能体,核心是让大模型具备思考、规划、调用工具、多轮执行、自主决策能力,不再只做单次问答,能自主完成复杂
RAG(检索增强生成)= 知识检索 + 大模型生成;知识检索是 RAG 的核心引擎,负责从外部知识库精准召回信息,解决大模型幻觉、知识过时、领域盲区三大痛点。下面从概念、原理、架构、检索技术、应用与选
分国际通用单位、我国法定计量单位、常用细分类别整理,精简好记,分大类列出: 一、国际基本计量单位(7 个,国际通用) 表格 物理量 单位名称 符号 长度 米 m 质量 千克 (公斤) kg 时间 秒
Token(词元) 是大模型处理文本的最小基本单位,可以理解为模型眼里的 “文字碎片”。 一、核心是什么 人类看文字是字、词、句子,AI 不会直接读懂字符,它会先把整段文本切割成一个个小片段,这些片段
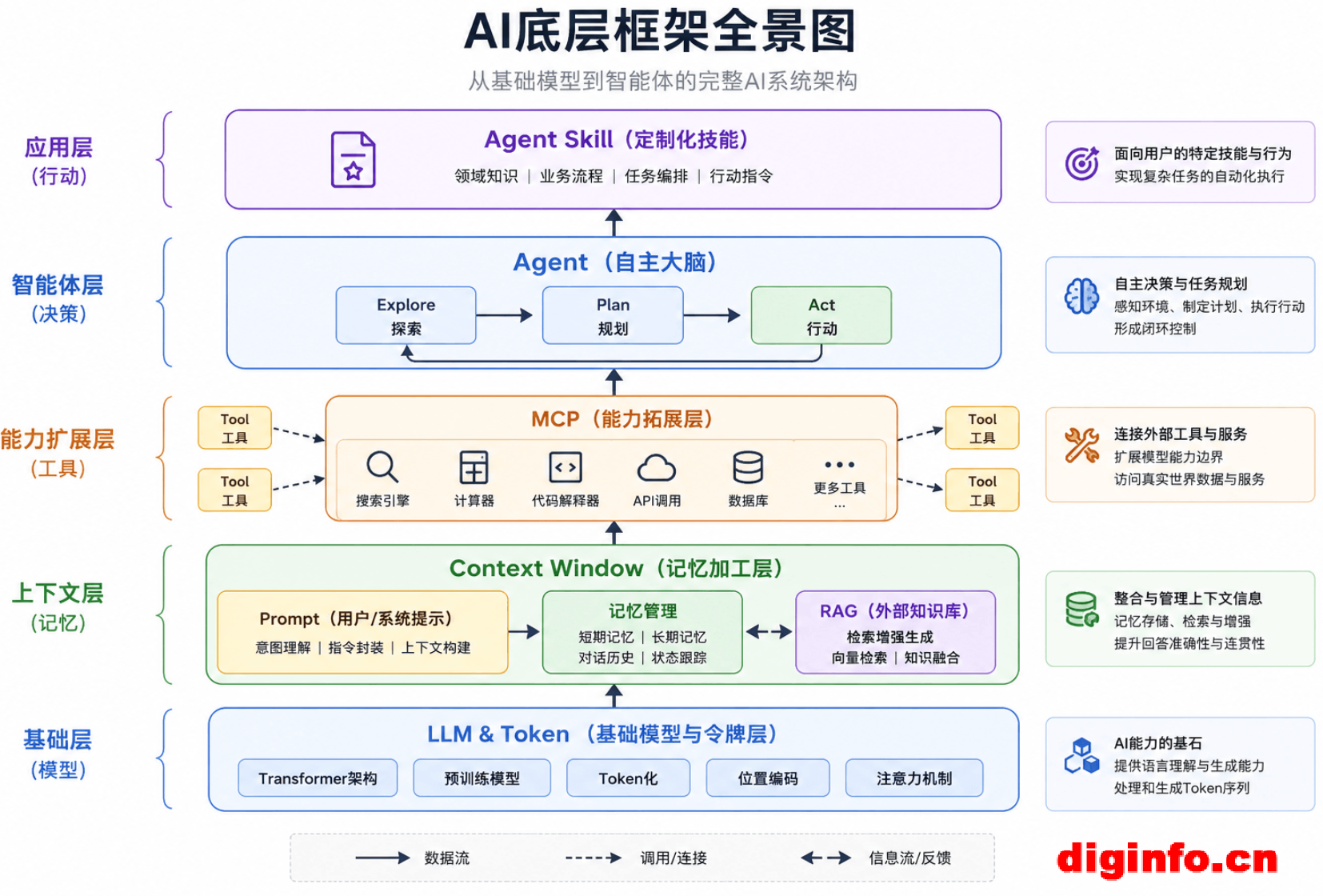
AI架构不再只是某一层的技术,而是如何将算力、数据、算法、框架和业务系统,有机组织成一个可运行、可扩展、可维护的智能系统。 一个完整的 AI 架构,通常呈现出清晰的分层与协作关系,我把它整合成下面这张
AI 框架全景,可以理解为支撑人工智能从数据处理、模型开发、训练调优,到部署应用的全生命周期软件工具集合。随着大模型时代的到来,框架的边界也在急速扩展。 我们可以将整个 AI 框架生态分为六大领域,它
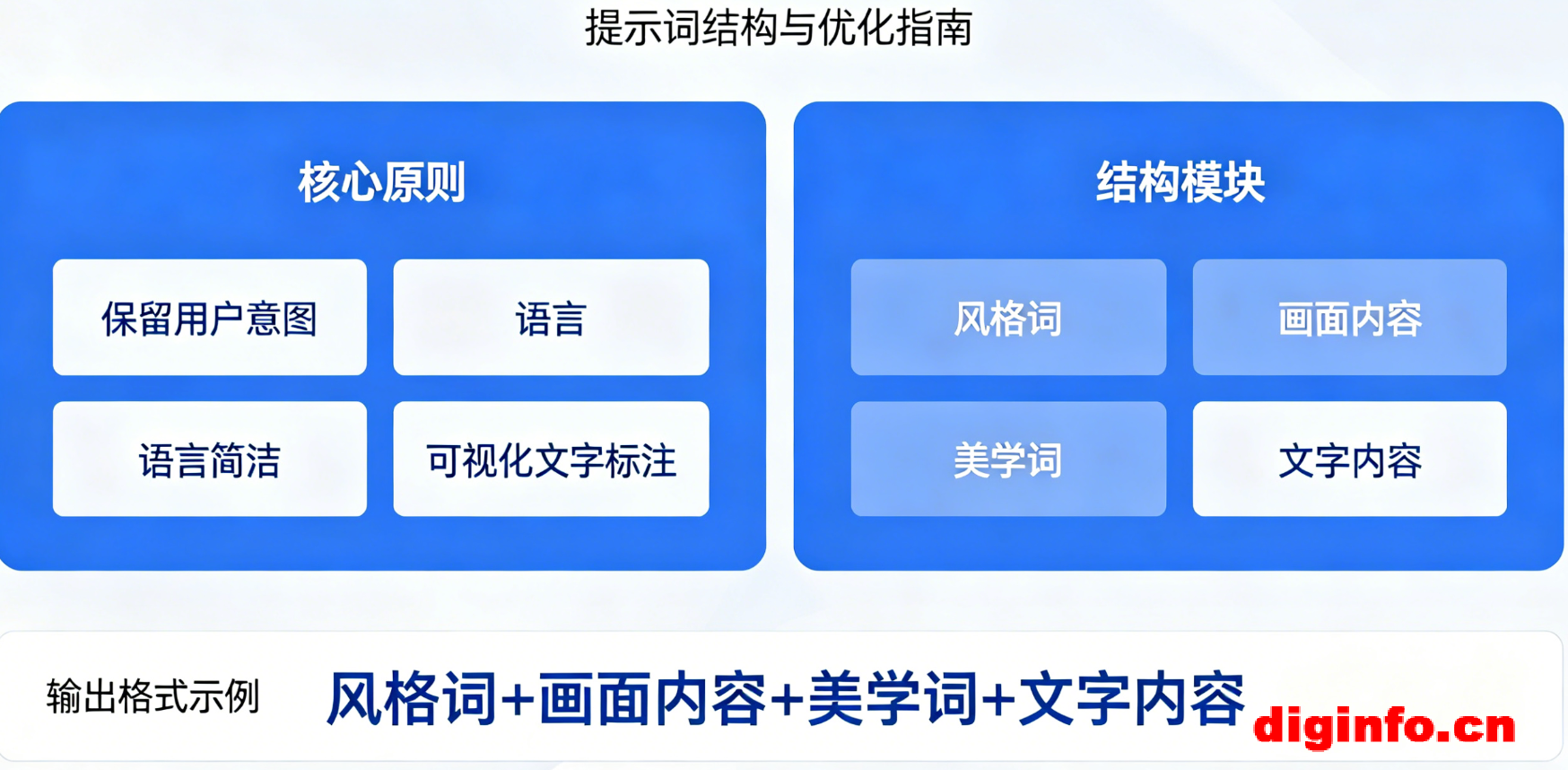
AI提示词工程,简单来说,就是一套研究和优化如何给AI(比如大语言模型)下指令的方法论,目的是让AI能够稳定、可控地输出高质量、符合你预期的结果。 它不仅仅是“问问题”,更像是一门“与AI协作的语言艺
当前大语言模型市场,大致形成了闭源与开源两大阵营分庭抗礼的格局。简单来说,闭源模型通常是追求极致性能的“全能冠军”,而开源模型则是兼顾性价比与灵活性的“定制利器”。下面为你梳理了截至2026年6月的主
免费AI向量模型主要分为本地部署的开源模型和提供免费额度的在线API。选哪种主要看你有多少预算、电脑配置以及对数据隐私的要求。 🤖 开源模型:数据安全,适合本地大规模应用 这类模型可自由下载部署,能
微信扫码加好友