OpenCV开发教程之常用滤波器
在OpenCV中,滤波器是图像处理的核心操作之一,主要用于去噪、平滑、锐化、边缘检测等。滤波器本质上是对图像像素及其邻域进行某种数学运算(通常是卷积或非线性运算)。下面从原理到实践,系统介绍OpenCV中最常用的滤波器。
🧠 基础知识:卷积与核(Kernel)
大多数线性滤波器的工作原理是卷积:用一个小的二维矩阵(核,Kernel)在图像上滑动,将核覆盖下的像素值与核系数相乘并求和,得到输出图像的一个像素。
核的大小通常是奇数(如3×3、5×5),这样有一个中心锚点。
📚 OpenCV常用滤波器分类与API
1. 均值滤波(平均滤波)
最简单的线性滤波器,核内所有系数相等,输出像素值为邻域内像素的平均值。
效果:平滑图像,去除高斯噪声,但会模糊边缘。
API:dst = cv2.blur(src, ksize, anchor=None, borderType=None)
ksize: (宽度, 高度),如(5,5)
快速实现:也可用cv2.boxFilter(),但blur是归一化的盒式滤波。
2. 高斯滤波
核的系数由二维高斯函数决定,中心权重最大,离中心越远权重越小。更符合自然图像的平滑需求。
效果:平滑效果更柔和,边缘保留稍好于均值滤波。
API:dst = cv2.GaussianBlur(src, ksize, sigmaX, sigmaY=0, borderType=None)
ksize: 必须是奇数,如(5,5)
sigmaX: X方向标准差,若为0则从ksize自动计算
sigmaY: Y方向标准差,默认等于sigmaX
3. 中值滤波
非线性滤波器,将核内像素值排序后取中位数作为输出。对椒盐噪声非常有效,且能较好保留边缘。
效果:去除孤立的亮点/暗点,保护边缘。
API:dst = cv2.medianBlur(src, ksize)
ksize: 核的大小(必须是大于1的奇数,如3,5,7)
4. 双边滤波
非线性、保边平滑滤波器。同时考虑空间邻近度(像素距离)和灰度相似度(像素值差异),因此在平滑平坦区域的同时,能保留边缘。
效果:美颜、去噪同时保持边缘清晰。
API:dst = cv2.bilateralFilter(src, d, sigmaColor, sigmaSpace, borderType=None)
d: 滤波直径。若为非正数,则从sigmaSpace计算。
sigmaColor: 颜色空间的标准差,越大表示颜色差异大的像素也会被纳入平滑。
sigmaSpace: 坐标空间的标准差,越大表示距离远的像素也会互相影响。
5. 自定义滤波(卷积)
如果你需要一个任意核(如锐化核、边缘检测核),可以用cv2.filter2D。
API:dst = cv2.filter2D(src, ddepth, kernel, anchor=None, delta=None, borderType=None)
ddepth: 输出图像深度,通常用-1表示与原图相同。
kernel: 自定义的核(numpy数组)。
常用自定义核示例:
锐化核:kernel_sobel_x = np.array([[-1, 0, 1],[-2, 0, 2],[-1, 0, 1]])
边缘检测(Sobel类似):kernel_sobel_x = np.array([[-1, 0, 1],[-2, 0, 2],[-1, 0, 1]])
💻 完整代码示例(Python)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图像(带噪声)
img = cv2.imread('./images/opencv-dot.png')
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # 用于matplotlib显示
# 1. 均值滤波
blur = cv2.blur(img, (5,5))
# 2. 高斯滤波
gaussian = cv2.GaussianBlur(img, (5,5), 0)
# 3. 中值滤波
median = cv2.medianBlur(img, 5)
# 4. 双边滤波
bilateral = cv2.bilateralFilter(img, 9, 75, 75)
# 5. 自定义锐化
kernel_sharpen = np.array([[0, -1, 0],
[-1, 5, -1],
[0, -1, 0]])
sharpened = cv2.filter2D(img, -1, kernel_sharpen)
# 显示对比
titles = ['Original', 'Mean', 'Gaussian', 'Median', 'Bilateral', 'Sharpened']
images = [img_rgb, blur, gaussian, median, bilateral, sharpened]
# 注意显示前需转换颜色空间(BGR转RGB)
for i in range(6):
plt.subplot(2,3,i+1)
if i == 0:
plt.imshow(images[i])
else:
plt.imshow(cv2.cvtColor(images[i], cv2.COLOR_BGR2RGB))
plt.title(titles[i])
plt.xticks([]), plt.yticks([])
plt.show()
代码运行后效果图:
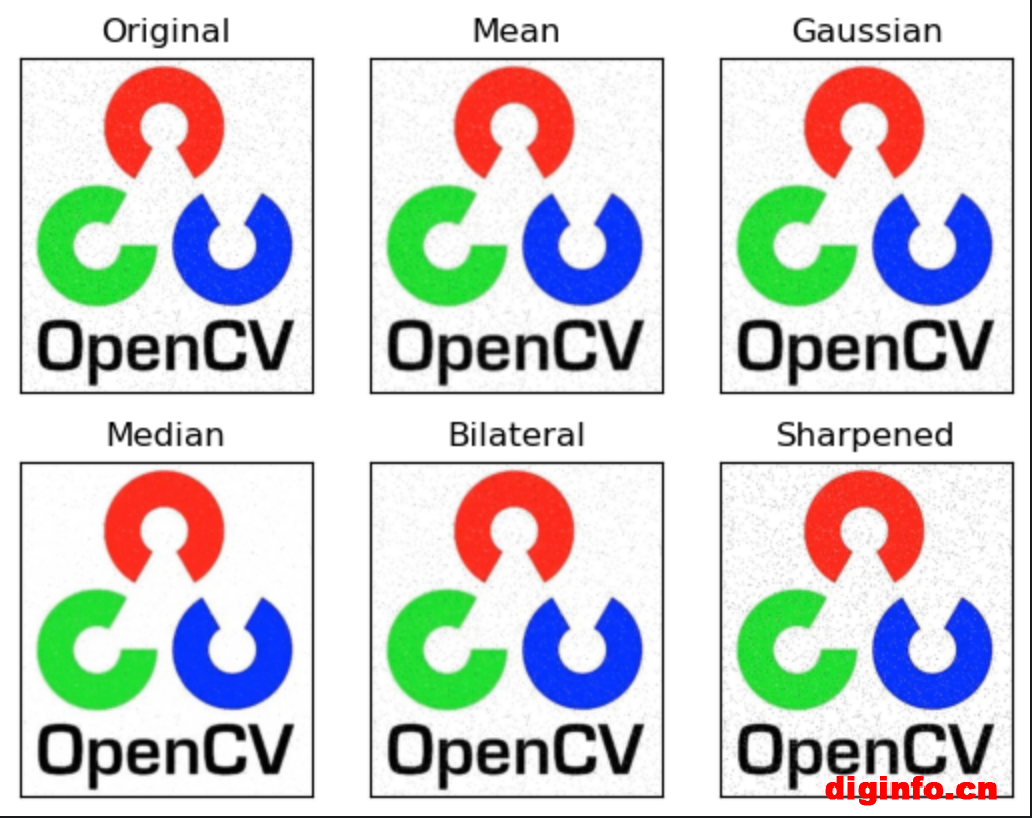
可以看到中值滤波的去噪效果最好。
🧪 滤波器选择指南(根据噪声类型)
| 噪声类型 | 推荐滤波器 | 原因 |
|---|---|---|
| 高斯噪声 | 高斯滤波、均值滤波 | 线性平滑能有效抑制正态分布噪声 |
| 椒盐噪声(黑白点) | 中值滤波 | 非线性,直接去除异常值 |
| 混合噪声 | 中值滤波+高斯滤波 | 先中值去椒盐,再高斯去高斯噪声 |
| 需要保留边缘 | 双边滤波、引导滤波(未展开) | 保边平滑 |
| 图像锐化 | 自定义锐化核、USM锐化 | 增强边缘对比度 |
⚙️ 性能与技巧
核越大,平滑越强,但计算量增大,边缘越模糊。
高斯滤波比均值滤波计算稍复杂,但效果更好,推荐作为默认平滑选择。
中值滤波对椒盐噪声非常有效,但对高斯噪声效果一般。
双边滤波参数调优较难:sigmaColor和sigmaSpace越大,平滑越强,但边缘保留能力下降。
实时应用中(如视频处理),均值或高斯滤波速度快;若噪声不严重,可尝试小核(3×3)。
🔧 扩展:方框滤波、各向异性滤波等
方框滤波 (cv2.boxFilter):不归一化的均值滤波,可指定是否归一化。
Scharr / Sobel 滤波:用于边缘检测,本质是微分滤波器。
拉普拉斯滤波:用于边缘检测,对噪声敏感。
引导滤波(OpenCV未内置,但可自己实现或使用cv2.ximgproc扩展模块):保边平滑,比双边滤波更快。
📖 总结
| 滤波器 | 类型 | 主要用途 | 参数关键点 |
|---|---|---|---|
blur |
线性,均值 | 简单去噪,模糊 | ksize |
GaussianBlur |
线性,高斯 | 通用去噪,模糊 | ksize, sigmaX |
medianBlur |
非线性 | 去除椒盐噪声,保护边缘 | ksize(奇数) |
bilateralFilter |
非线性 | 保边平滑,美颜 | d, sigmaColor, sigmaSpace |
filter2D |
线性 | 自定义卷积(锐化、边缘等) | kernel |
掌握了这些滤波器,你就能够处理大部分图像增强和去噪任务。如果需要更高级的滤波(如自适应滤波、频域滤波),可以进一步学习OpenCV的dft、imgproc等模块。


全部评论